Diode Clipper¤
Introduction¤
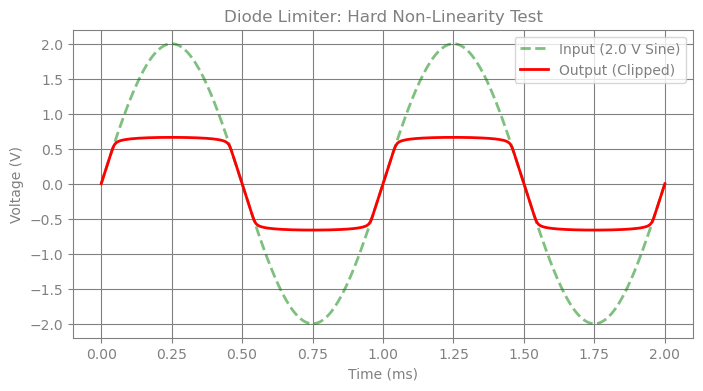
In this example, we will simulate a classic Diode Clipper (Limiter) circuit. This circuit is a fundamental building block in analog signal processing, used to protect sensitive components from voltage spikes or to shape waveforms by "clipping" signal peaks.
From a simulation perspective, the Diode Clipper serves as a critical benchmark for testing non-linear solvers. As the input voltage crosses the diode's forward-bias threshold, the component's impedance changes rapidly—spanning orders of magnitude from "off" to "on." This behavior creates a stiff system of differential equations, requiring a robust, adaptive step-size controller to maintain numerical stability.
import time
import diffrax
import jax
import jax.numpy as jnp
import matplotlib.pyplot as plt
from circulax import compile_circuit
from circulax.components.electronic import Diode, Resistor, VoltageSourceAC
jax.config.update("jax_enable_x64", True)
Defining the Netlist¤
vpp = 2.0
net_dict = {
"instances": {
"GND": {"component": "ground"},
"Vin": {
"component": "source_voltage",
"settings": {
"V": vpp,
"freq": 1e3,
},
},
"R1": {"component": "resistor", "settings": {"R": 1000.0}},
"D1": {
"component": "diode",
"settings": {
"Is": 1e-14,
},
},
"D2": {
"component": "diode",
"settings": {
"Is": 1e-14,
},
},
},
"connections": {
"GND,p1": ("Vin,p2", "D1,p2", "D2,p1"),
"Vin,p1": "R1,p1",
"R1,p2": ("D1,p1", "D2,p2"),
},
"ports": {"in": "Vin,p1", "out": "R1,p2"},
}

models_map = {
"resistor": Resistor,
"diode": Diode,
"source_voltage": VoltageSourceAC,
"ground": lambda: 0,
}
print("1. Compiling Circuit...")
circuit = compile_circuit(net_dict, models_map, backend="klu_split")
print(f" System Size: {circuit.sys_size} variables")
print("2. Solving DC Operating Point...")
y_dc = circuit.dc()
print(f" DC Solution (First 5): {y_dc[:5]}")
print("3. Running Transient Simulation...")
t_max = 2e-3
saveat = diffrax.SaveAt(ts=jnp.linspace(0, t_max, 300))
step_controller = diffrax.PIDController(
rtol=1e-3,
atol=1e-6,
pcoeff=0.2,
icoeff=0.5,
dcoeff=0.4,
force_dtmin=True,
dtmin=1e-8,
dtmax=1e-5,
error_order=2,
)
start = time.time()
sol = circuit.transient(
t0=0,
t1=t_max,
dt0=1e-6 * t_max,
y0=y_dc,
saveat=saveat,
stepsize_controller=step_controller,
)
stop = time.time()
if sol.result == diffrax.RESULTS.successful:
print(" ✅ Simulation Successful")
print(f"Performed {sol.stats['num_steps']} steps performed in {stop - start:.2f} seconds")
ts = sol.ts
v_in = circuit.port(sol.ys, "in")
v_out = circuit.port(sol.ys, "out")
plt.figure(figsize=(8, 4))
plt.plot(ts * 1000, v_in, "g--", alpha=0.5, linewidth=2, label=f"Input ({vpp} V Sine)")
plt.plot(ts * 1000, v_out, "r-", linewidth=2, label="Output (Clipped)")
plt.title("Diode Limiter: Hard Non-Linearity Test")
plt.xlabel("Time (ms)")
plt.ylabel("Voltage (V)")
plt.legend()
plt.grid(True)
plt.show()
else:
print(" ❌ Simulation Failed")
print(f" Result Code: {sol.result}")
1. Compiling Circuit...
System Size: 4 variables
2. Solving DC Operating Point...
DC Solution (First 5): [0. 0. 0. 0.]
3. Running Transient Simulation...
✅ Simulation Successful
Performed 591 steps performed in 1.32 seconds