LC Ladder¤
Introduction¤
To stress-test the solver's performance on large-scale systems, we simulate a Lumped-Element Transmission Line. By cascading \(N\) identical L-C sections, we approximate a continuous transmission line using a finite difference method.This simulation serves two critical benchmarking purposes:
Sparse Linear Algebra: With \(N=1000\) sections, the system generates a Jacobian matrix of size \(2000 \times 2000\). However, the connectivity is strictly local (node \(i\) only connects to \(i-1\) and \(i+1\)). This results in a banded sparse matrix, allowing us to verify if the underlying KLU/sparse solver is effectively optimizing for sparsity.
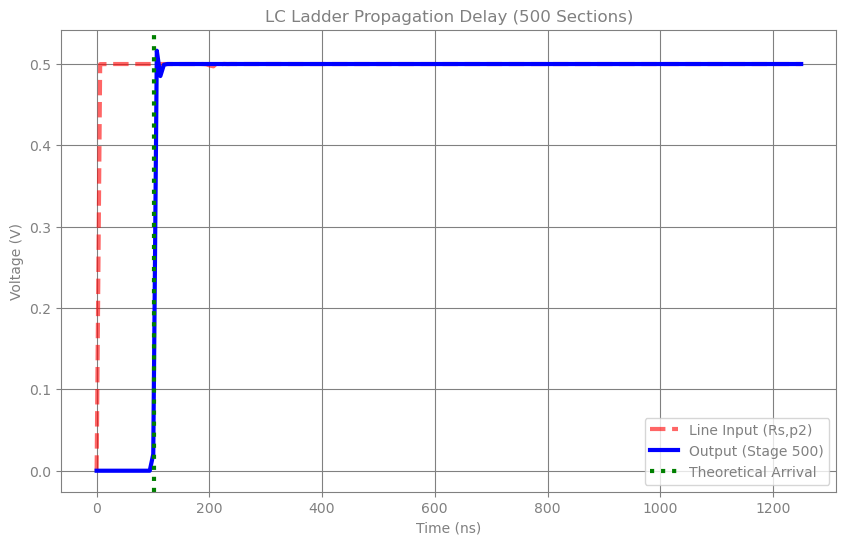
Wave Propagation: The circuit models a signal propagating with a delay of \(t_d = \sqrt{LC}\) per stage. We can validate the solver's time-stepping accuracy by measuring the total propagation delay against the theoretical value \(T_{total} = N \times \sqrt{LC}\).
Circuit Parameters¤
Inductance (\(L\)): \(10\text{nH}\)
Capacitance (\(C\)): \(4\text{pF}\)
Characteristic Impedance (\(Z_0\)): \(\sqrt{L/C} = 50\Omega\)
Termination: If \(R_{load} = Z_0\), reflections should be minimized. If \(R_{load} \neq Z_0\), we expect distinct reflection patterns.
import time
import diffrax
import jax
import jax.numpy as jnp
import matplotlib.pyplot as plt
from circulax import compile_circuit
from circulax.components.electronic import (
Capacitor,
Inductor,
Resistor,
SmoothPulse,
)
jax.config.update("jax_enable_x64", True)
def create_lc_ladder(n_sections):
"""
Generates a netlist for an L-C transmission line.
V_in -> R_source -> [L-C] -> [L-C] ... -> R_load -> GND
"""
net = {
"instances": {
"GND": {"component": "ground"},
"Vin": {
"component": "voltage_source",
"settings": {"V": 1.0, "delay": 2e-9, "tr": 1e-11},
}, # Step at 1ns
# "Vin": {"component": "voltage_source", "settings": {"V": 1.0, "freq":FREQ}}, # Step at 1ns
"Rs": {"component": "resistor", "settings": {"R": R_SOURCE}},
"Rl": {"component": "resistor", "settings": {"R": R_LOAD}},
},
"connections": {},
}
# 1. Input Stage: GND -> Vin -> Rs -> Node_0
net["connections"]["GND,p1"] = ("Vin,p2", "Rl,p2") # Ground input and load
net["connections"]["Vin,p1"] = "Rs,p1"
previous_node = "Rs,p2"
# 2. Ladder Generation
for i in range(n_sections):
l_name = f"L_{i}"
c_name = f"C_{i}"
# node_inter = f"n_{i}" # Node between L and C
# Add Components
# L=10nH, C=4pF -> Z0 = sqrt(L/C) = 50 Ohms.
# Delay per stage = sqrt(LC) = 200ps.
net["instances"][l_name] = {"component": "inductor", "settings": {"L": 10e-9}}
net["instances"][c_name] = {"component": "capacitor", "settings": {"C": 4e-12}}
# Connections
# Prev -> L -> Inter -> C -> GND
# Prev -> L -> Inter -> Next L...
# Connect L: Previous Node -> Inter Node
net["connections"][f"{l_name},p1"] = previous_node
net["connections"][f"{l_name},p2"] = f"{c_name},p1" # Connect L to C
# Connect C: Inter Node -> GND
net["connections"]["GND,p1"] = (*net["connections"]["GND,p1"], f"{c_name},p2")
# Advance
previous_node = f"{l_name},p2" # The node after the inductor is the input to the next
# 3. Termination
net["connections"]["Rl,p1"] = previous_node
net["ports"] = {"in": "Rs,p2", "out": "Rl,p1"}
return net

models_map = {
"resistor": Resistor,
"capacitor": Capacitor,
"inductor": Inductor,
"voltage_source": SmoothPulse,
"ground": lambda: 0,
}
print(f"Generating {N_SECTIONS}-stage LC Ladder...")
net_dict = create_lc_ladder(N_SECTIONS)
t0_compile = time.time()
circuit = compile_circuit(net_dict, models_map)
print(f"Compilation finished in {time.time() - t0_compile:.4f}s")
print(f"System Matrix Size: {circuit.sys_size}x{circuit.sys_size} ({circuit.sys_size**2} elements)")
print("Solving DC Operating Point...")
y0 = circuit.dc()
print("Running Transient Simulation...")
step_controller = diffrax.PIDController(
rtol=1e-3,
atol=1e-4,
pcoeff=0.2,
icoeff=0.5,
dcoeff=0.0,
force_dtmin=True,
dtmin=1e-14,
dtmax=1e-9,
error_order=2,
)
t0_sim = time.time()
sol = circuit.transient(
t0=0.0,
t1=T_MAX,
dt0=1e-11,
y0=y0,
stepsize_controller=step_controller,
max_steps=1000000,
saveat=diffrax.SaveAt(ts=jnp.linspace(0, T_MAX, 200)),
progress_meter=diffrax.TqdmProgressMeter(refresh_steps=100),
)
if sol.result == diffrax.RESULTS.successful:
print(" ✅ Simulation Successful")
t_end_sim = time.time()
print(f"Simulation completed in {t_end_sim - t0_sim:.4f}s")
print(f"Total Steps: {sol.stats['num_steps']}")
ts = sol.ts * 1e9
v_in = circuit.port(sol.ys, "in")
v_out = circuit.port(sol.ys, "out")
plt.figure(figsize=(10, 6))
plt.plot(ts, v_in, "r--", alpha=0.6, linewidth=3.0, label="Line Input")
plt.plot(ts, v_out, "b-", linewidth=3.0, label=f"Output (Stage {N_SECTIONS})")
plt.title(f"LC Ladder Propagation Delay ({N_SECTIONS} Sections)")
plt.xlabel("Time (ns)")
plt.ylabel("Voltage (V)")
plt.legend(loc="upper left")
plt.grid(True)
theory_delay = N_SECTIONS * jnp.sqrt(10e-9 * 4e-12) * 1e9
plt.axvline(theory_delay + 1.0, color="green", linestyle=":", linewidth=3.0, label="Theoretical Arrival")
plt.legend()
plt.show()
else:
print(" ❌ Simulation Failed")
print(f" Result Code: {sol.result}")
Generating 500-stage LC Ladder...
Compilation finished in 2.0344s
System Matrix Size: 1004x1004 (1008016 elements)
Solving DC Operating Point...
Running Transient Simulation...
✅ Simulation Successful
Simulation completed in 7.4395s
Total Steps: 19662